中国粉体网讯 随着机器人技术的持续研发与各行业的广泛应用,机器人驱动系统的重要性日益凸显,尤其是在人形机器人灵巧手领域。灵巧手是一种末端执行器,可实现精细化的功能,比如捏取易碎物品、可适应不同物品的特性和形状等。灵巧手一般安装于机器人腕部的末端,是直接执行任务的装置,对提高机器人的柔性和易用性有着极为重要的作用,其性能的优劣在很大程度上决定了整个机器人的工作性能。
腱绳传动是目前应用范围最广的传动方案。该传动方式是通过腱绳及缠绕腱绳的辅助装置,将驱动源产生的力矩传递至手指各关节。其基本工作原理为:安装在灵巧手前臂内的电机驱动滚珠丝杠运转,借助螺母将滚珠丝杠的旋转运动转化为直线平动;缠绕在螺母上的腱绳会随螺母平动产生拉力,进而牵引手指实现绕关节轴的转动。
腱绳材料包括钢丝绳或高分子材料绳,其中金属腱绳兼具高强度、抗拉伸特性与一定韧性,已被多数企业认可与采用。
然而,当前市场上的金属腱绳多采用不锈钢、钛合金或镍钛合金材质,在实际应用中存在明显的材料性能失衡问题,核心痛点是现有产品难以同时满足“高强度”与“抗疲劳”的双重需求。具体表现为:质量较好的腱绳中,高强度不锈钢腱绳在高频次受力后易发生局部断裂;韧性更优的钛合金腱绳则存在承重上限偏低的问题;而常规腱绳普遍存在蠕变性大的缺陷,无法满足机器人传动的精准性要求,且柔韧性不足,难以适配具身机器人对灵活性的使用需求。
基于此,山东大业股份有限公司提出了一种机器人驱动传动用腱绳及其制备方法,使腱绳同时具备“高强度”与“抗疲劳”需求。
此专利提供了一种机器人驱动传动用腱绳,包括由第一钨丝捻制形成的中心股绳C4、由第二钨丝捻制形成的外层股绳C5;腱绳的结构为7×7×7×D1+6×[(7×7×D1)+6×(7×D2)],其中,D1为第一钨丝的直径,D2为第二钨丝的直径。
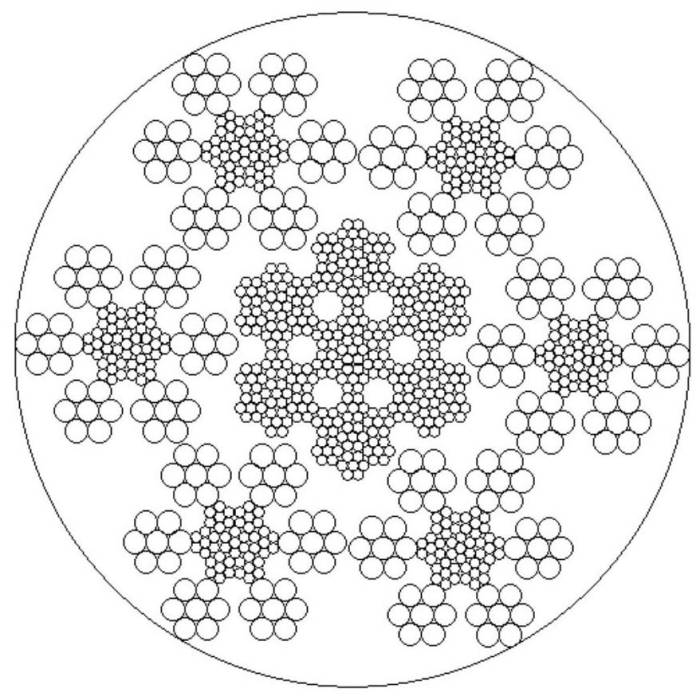
来源:《一种机器人驱动传动用腱绳及其制备方法》(谢飞等)
腱绳制备步骤如下:
步骤一:中心股绳C4的制备
取7根第一钨丝,经捻制形成股绳C1;取7根股绳C1,经捻制形成股绳C3;
取7根股绳C3,经捻制形成中心股绳C4。
步骤二:外层股绳C5的制备
取7根第二钨丝,经捻制形成股绳C2;取1根步骤一制备的股绳C3和6根本步骤制备的股绳C2,经捻制形成外层股绳C5。
步骤三:腱绳的制备
取1根步骤一制备的中心股绳C4和6根步骤二制备的外层股绳C5,经捻制形成腱绳,最终得到7×7×7×D1+6×[(7×7×D1)+6×(7×D2)]结构的腱绳。
此专利相较于现有技术具备如下有益效果:在保持腱绳直径恒定的前提下,既有效提升了腱绳的载荷强度,又显著增强了其柔韧性,可同时满足机器人驱动传动场景对腱绳“高强度”与“抗疲劳”的双重核心要求,进而大幅提高了腱绳在精密传动领域的适配性能。
参考来源:
谢飞.一种机器人驱动传动用腱绳及其制备方法
(中国粉体网编辑整理/月明)
注:图片非商业用途,存在侵权告知删除!