传统机器人末端执行器多以夹爪为主,在灵活性与精准度上存在明显局限。作为机器人直接执行作业任务的核心部件,末端执行器的形态丰富多样,涵盖夹持器、抓持手、灵巧手等品类,各类形态的产品均有其专属的适配场景,通常被安装在机器人腕部的末端位置。
应用:人形概念的具象载体
人形机器人搭载的灵巧手以人类手掌为仿生设计蓝本,需要应对多样化的非标作业任务,因此对灵活性、精准度等性能指标提出了更高要求。也正因其结构与人手高度相似,灵巧手成为了人形机器人概念从理论走向现实的核心具象载体。
传统夹爪或抓持手通常配备6个左右主动自由度,动作单一但稳定性强,定位为工业场景首选方案,适配汽车装配、物流搬运等追求高性价比与高稳定性的标准化作业,其驱动模块多采用结构简单的无刷直流电机,通过直驱或齿轮传动控制成本,单机价格处于千元级别,搭配成熟控制算法即可实现高可靠性、低故障率的重复性操作。

机器人末端夹爪 来源:Zimmer Group
灵巧手具有高自由度、高精度等特点,驱动模块主流采用高功率密度、低噪音的空心杯电机,结合行星减速器+腱绳传动方案,部分产品额外搭配微型丝杠或蜗轮蜗杆,以实现高动态响应。可以与人形机器人搭配执行多种复杂任务,如抓握小型物体、搬运物品等,在工业场景、商业场景、家用场景中均有较大的应用潜力。
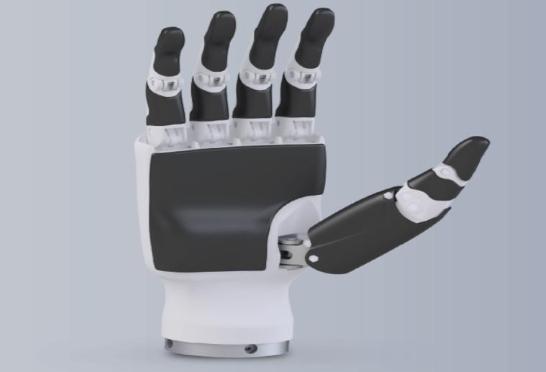
灵巧手产品 来源:因时机器人
成本:占整机成本比例高
灵巧手的成本约占整机成本的17%,是整机成本占比最高的核心部件之一。以特斯拉Optimus人形机器人为例,其灵巧手成本占整机总成本的比例约为17.2%,在所有部件中占比最大。细分灵巧手的成本构成,六维力传感器占整机成本8.0%,空心杯电机占比为4.8%,二者是灵巧手的核心成本来源;此外,行星减速器与蜗轮蜗杆各占1.8%,编码器占比0.9%。
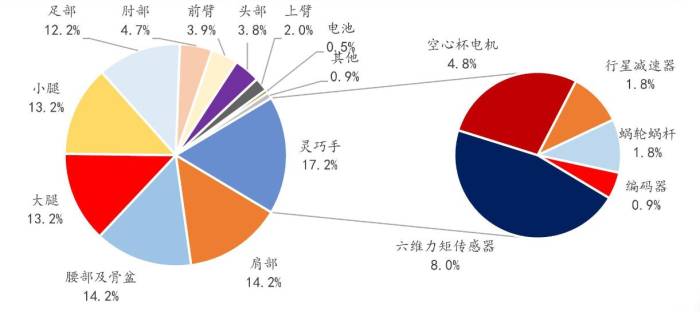
特斯拉Optimus成本拆分 来源:Morgan Stanley,华金证券研究所
迭代:自由度、感知能力逐步提升
当前人形机器人产业尚未实现规模化落地,灵巧手技术路线仍处于探索阶段,尚未形成统一标准,但整体发展趋势已明确指向更高灵巧性与更强感知能力两大核心方向。
特斯拉Optimus灵巧手单手自由度从初代的11个提升至第三代的22个,感知方案从早期仅搭载力与位置传感器,未配备触觉感知模块,而第三代产品不仅实现全手触觉传感器覆盖,更融合AI视觉技术,可支持动态抓取等复杂操作。Optimus的应用边界也从抓取水壶、搬运货箱等基础任务,逐步延伸至接住飞行的网球、弹奏乐器等高精度动态任务场景。
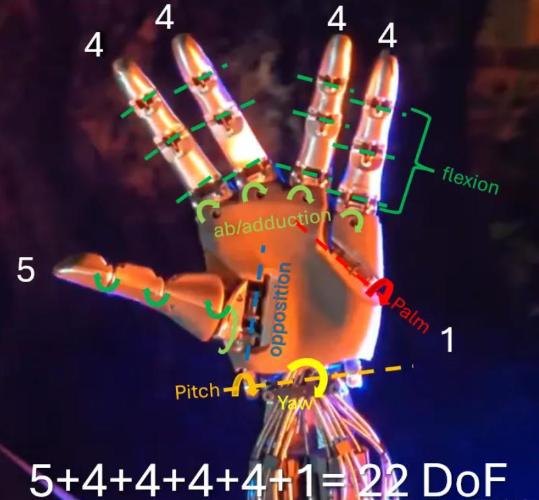
Optimus灵巧手单手自由度有22个 来源:华金证券研究所
未来,随着核心零部件国产化替代进程的推进、AI感知算法的持续优化以及规模化生产效应的释放,灵巧手有望在成本控制与性能提升上实现双重突破,进一步拓展人形机器人在精密制造、医疗护理、家庭服务等多元场景的应用深度与广度,成为推动人形机器人从“概念”走向“实用”的关键支撑。
参考来源:
各企业官网
华金证券《人形机器人系列报告(二):人形机器人末端执行器,灵巧手产业化加速落地》
(中国粉体网编辑整理/月明)
注:图片非商业用途,存在侵权告知删除!