中国粉体网讯 丝杠是一种将电机的旋转运动转化为直线运动的关键机械部件,广泛应用于各类具备直线运动功能的设备中。工作时,电机通过联轴器驱动丝杠轴旋转,丝杠轴上的螺母则借助螺旋形螺纹的传动作用,实现直线往复运动,进而将电机输出的旋转力矩,转化为驱动设备完成直线动作所需的线性驱动力。

丝杠基本原理示意图 来源:中国步进电机网
根据摩擦特性与加工方式的差异,丝杠可划分为多种类型。其中,按摩擦特性分类可分为三大类,分别是滑动丝杠、滚动丝杠和静压丝杠;而滚动丝杠又可进一步细分为滚珠丝杠与行星滚柱丝杠。
在具体传动特性上,梯形丝杠属于滑动丝杠范畴,其结构内无滚动体,依靠滑动摩擦传递推力,因此传动效率相对偏低。滚珠丝杠与行星滚柱丝杠则归属于滚动丝杠,二者均配备钢球或螺杆型滚动体,通过滚动摩擦的方式传递推力,传动效率大幅提升。静压丝杠的摩擦形式为液体摩擦,凭借这一特性,它能够适配需要较大进给推力以及承受频繁振动负载的应用场景。
行星滚柱丝杠应用于高精度、高承载领域
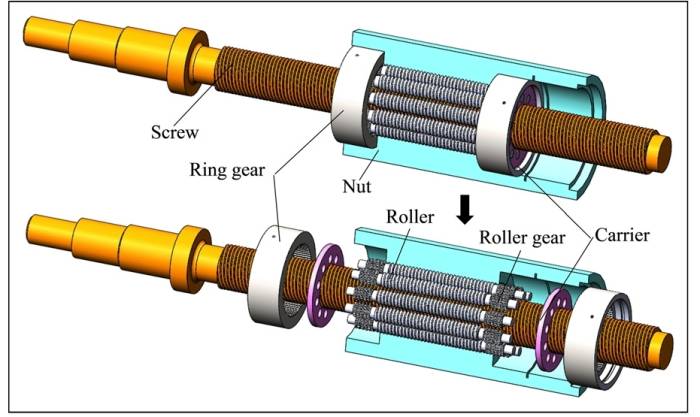
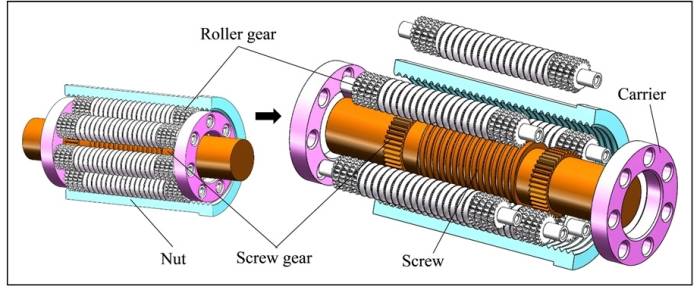
行星滚柱丝杠具有螺纹传动和滚动螺旋传动的综合特征。其滚动体为多个带螺纹的滚柱,当螺母或丝杠旋转时,通过滚柱的行星运动可将旋转运动转换为直线运动。行星滚柱丝杠传动中特有的滚柱结构,使得滚柱与螺母(或滚柱与丝杠)之间无相对轴向位移,滚柱能够在丝杠和螺母形成的封闭空间内反复循环运动,依靠滚动/滑动摩擦实现运动和动力的传递。
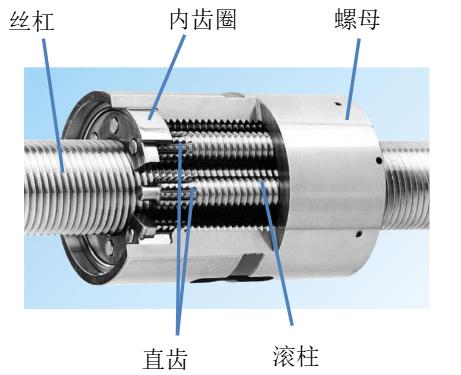
行星滚柱丝杠示意图 来源:东吴证券研究所
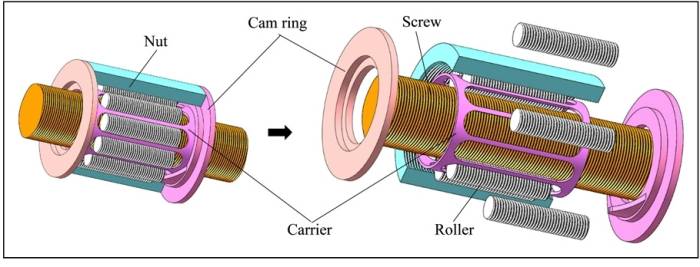
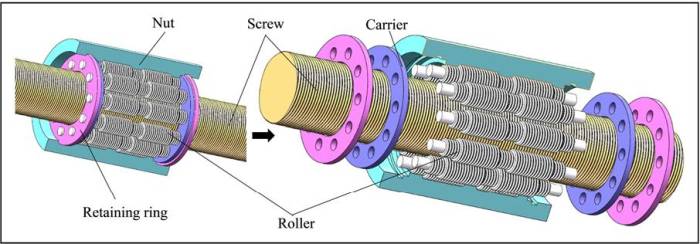
按照结构设计的差异,行星滚柱丝杠可划分为标准式、反向式、循环式、差动式与轴承环式五大类,不同类型的产品在性能特点上各有侧重,适用领域也存在明显区别。
标准式行星滚柱丝杠:是当前应用范围最广的品类,凭借稳定的传动精度与适配性,广泛应用于精密机床、工业机器人、军工装备等领域。
来源:Wu.A review of planetary roller screw mechanism for development and new trends
反向式行星滚柱丝杠:在极端工况下具备良好的适应性,主要应用于航空航天、船舶制造、电力装备等对稳定性要求严苛的领域。
来源:Wu.A review of planetary roller screw mechanism for development and new trends
循环式行星滚柱丝杠:兼具高刚度、高承载能力与高精度的优势,适用于医疗器械、光学精密仪器等对传动性能要求极高的场景。
来源:Wu.A review of planetary roller screw mechanism for development and new trends
差动式行星滚柱丝杠:传动比大且承载能力较强,可满足大传动比、高载荷的应用需求。
来源:Wu.A review of planetary roller screw mechanism for development and new trends
轴承环式行星滚柱丝杠:突出高承载、高效率的性能特点,主要应用于石油化工、重型机械等重载作业领域。
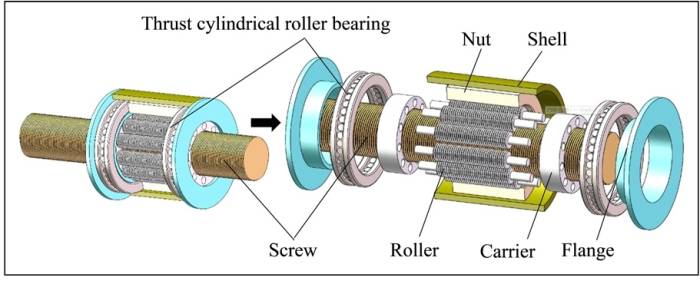
来源:Wu.A review of planetary roller screw mechanism for development and new trends
行星滚柱丝杠成人形机器人核心传动方案
特斯拉人形机器人Optimus搭载40个机电执行器,具体分布为:手臂8个、躯干8个、手部12个、腿部12个。其中,14个执行器为线性执行器,主要应用于腕部与踝部的俯仰、偏航运动,以及髋部、肘部、膝部的俯仰动作。
线性执行器的核心技术方案为“电机+行星滚柱丝杠+轴承+传感器”的组合架构,反向行星滚柱丝杠是其核心部件。从结构组成来看,线性执行器集成了无框力矩电机、行星滚柱丝杠、力传感器、四点接触轴承、球轴承以及位置传感器等多元组件。
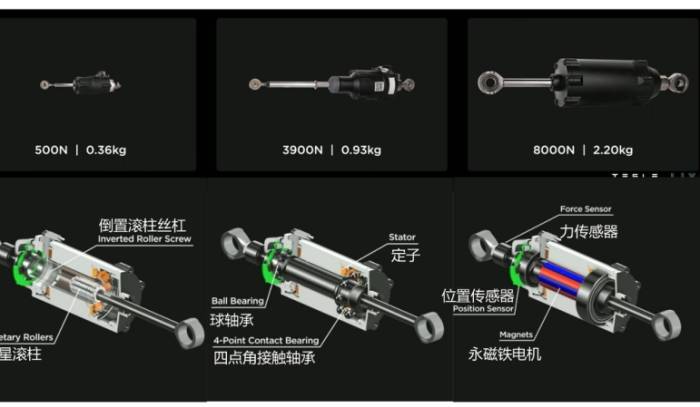
Optimus线性执行器结构 来源:特斯拉
此外,特斯拉展示的第三代灵巧手模型共具备22个自由度。从结构细节来看,该灵巧手的每根手指均设有三个关节,分别为远端关节(DIP)、中间关节(PIP)和近端关节(MCP)。其中,DIP与PIP关节共享1个自由度,可实现弯曲与伸展动作;MCP关节则具备2个自由度,除能完成弯曲与伸展外,还可实现内收与外展动作。

Optimus灵巧手迭代 来源:特斯拉
基于上述自由度配置方案,特斯拉该款灵巧手单只手需配备17-22个丝杠。每个主动自由度均采用“1个微型电机+1个滚珠丝杠+1个腱绳+1个传感器”的集成化配置方案。
鉴于丝杠在实现高精度运动控制方面具备显著优势,随着人形机器人产业的快速发展,丝杠的市场需求将持续攀升,这也将成为未来丝杠市场规模增长的核心增量来源。
参考来源:
东吴证券《人形机器人催化丝杠国产化,优质企业乘势而上——丝杠行业深度报告》
Wu.A review of planetary roller screw mechanism for development and new trends
(中国粉体网编辑整理/月明)
注:图片非商业用途,存在侵权告知删除!